Tectonic Smoothing and Mapping 2
Divide and Conquer — Julius Caesar
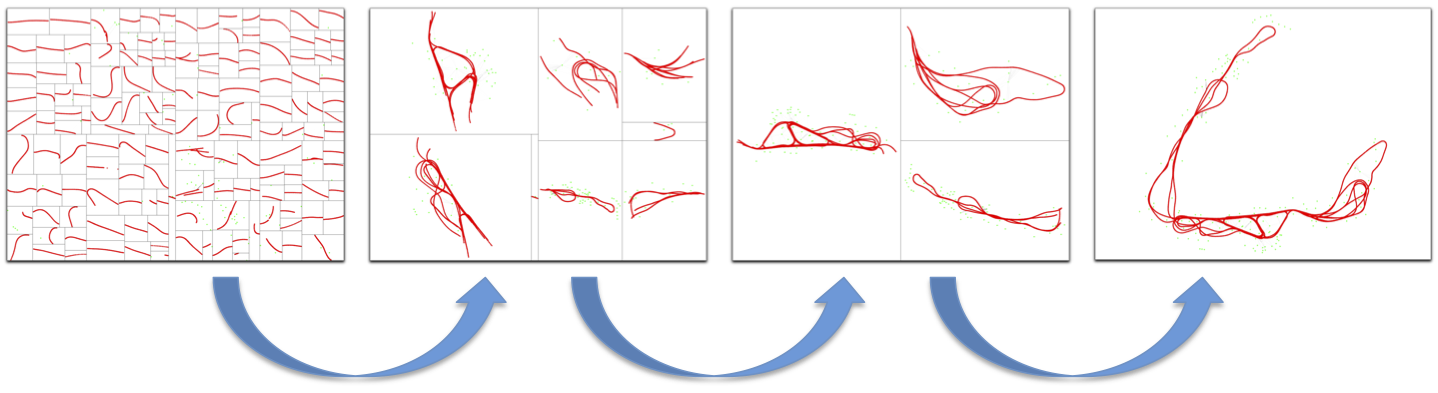
We propose a novel batch algorithm for SLAM problems that distributes the workload in a hierarchical way. We show that the original SLAM graph can be recursively partitioned into multiple-level submaps using the nested dissection algorithm, which leads to the cluster tree, a powerful graph representation. By employing the nested dissection algorithm, our algorithm greatly minimizes the dependencies between two subtrees, and the optimization of the original SLAM graph can be done using a bottom-up inference along the corresponding cluster tree. To speed up the computation, we also introduce a base node for each submap and use it to represent the rigid transformation of the submap in the global coordinate frame. As a result, the optimization moves the base nodes rather than the actual submap variables.